AVM 7766系统能支持CVBS 摄像头输入;2D/3D周边视图显示、泊车辅助、超声波雷达距离预警、DVR功能、移动目标检测(MOD)、车道偏离预警系统(LDWS)。
产品介绍
![]() 概述
概述
※ 360度全景监测系统(360 AVM System)可以帮助驾驶员360度查看车辆周围的情况,避免发生碰撞。
※ 系统由四个摄像头(含固定支架)和一个全景ECU控制器(含固定支架)组成;全景ECU控制器能执行视频图像算法、图像视角转换、多个摄像头画面过渡模糊熔合处理技术,及画面组成等功能,能提供2D/3D、前、后、左、右摄像头画面或其中一组合状态画面功能,能通过CAN总线进行通讯获取车辆相关信息,输出信号到车辆多媒体屏进行画面显示。※ AVM 7766 系统可输出CVBS信号,支持NTSC制式
![]() 参考参数
参考参数
ECU | 参 数 |
工作电压 | 9~16VDC |
系统启动时间 | ≤2S |
系统能耗 | LVDS |
工作温度 | -40℃ ~ 85℃ |
存储温度 | -40℃ ~ 85℃ |
输入输出视频信号 | CVBS |
输出分辨率 | 1280 x 720 pixels |
candid
摄像头 | 参 数 |
工作电压 | 4.5V~5.5VDC |
有效像素 | 720(H) x 480(V) |
系统能耗 | Normal 60mA@5.0VDC |
工作温度 | -40℃ ~ 85℃ |
最小照度 | ≥ 50IRE@0.5 Lux |
信噪比SNR | ≥ 41dB |
动态范围 | 4 channels |
防水等级 | ISO20653 IP6K9K |
水平角度 | 192° |
垂直角度 | 142° |
![]() 功能介绍
功能介绍
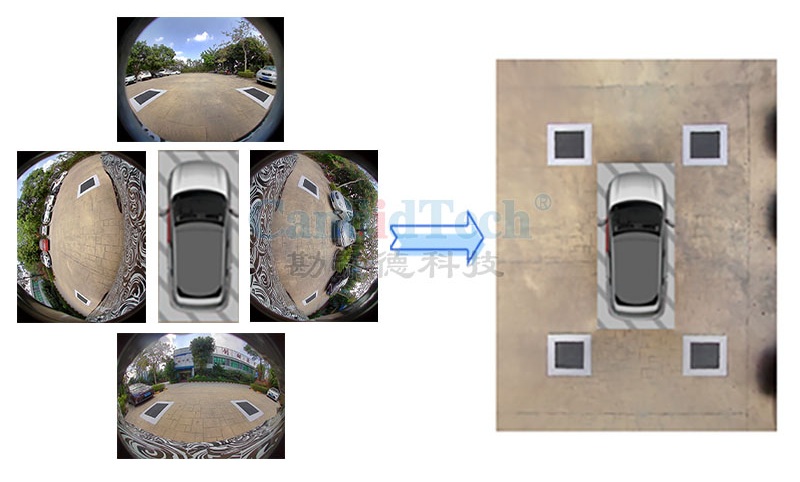
1) 2D 全景环视
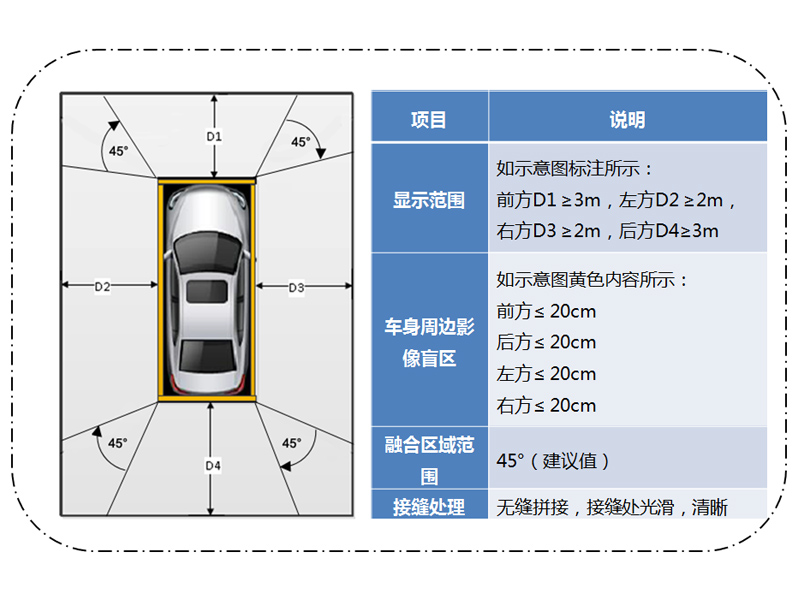
把车身周边4个摄像头的原始鱼眼图像经算法正投影到地平面上,并拼接为车身四周360度的图像,同时进行自动亮度平衡,保证各种光线下画面亮度和色彩一致性,方便驾驶员观测车身周边环境。
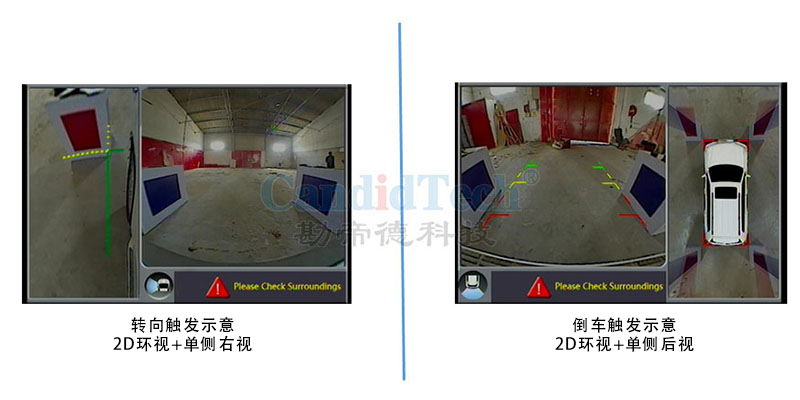
2) 单侧视图
该系统可以显示不同方向的图像。将车辆前后左右中某一侧的单独视角影像进行鱼眼矫正后输出,方便驾驶员观察车辆周围环境,如下图所示:

3) 3D 全景环视

4) 视图切换
系统可根据转向灯、档位信息、AVM按键、等进行各种视图模式切换。
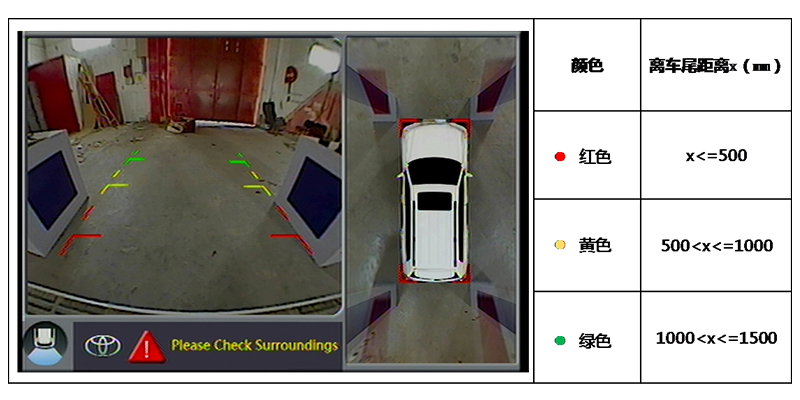
5) 辅助轨迹线
当驾驶员换挡到“R”档时,系统将显示2D俯视图和后视图。同时会出现静态辅助线或动态辅助线,以辅助驾驶员停车或倒车。
注:轨迹线可选,用户可根据需要选择静态轨迹线或动态轨迹线或不显示轨迹线。